ヒューマンメカトロニクス(上野)研究室
| 研究内容 |
|---|
|
家庭やオフィス、福祉現場や工場などでの安心・安全・快適化に、人と密接に関わるロボットや知能機械システムの活躍が期待されています。このようなメカトロニクスシステムは、ユーザや対象者の特性に合わせて、 その意図を忠実に反映するように、 賢く安全に機能することが重要です。誰もが使えるユニバーサルデザインから、 個々のユーザに合わせたパーソナルデザインへのパラダイムシフトが求められています。
そのため当研究室では、人に直接接して協調・支援するメカトロニクスシステムを対象に、 ユーザのふるまいや特性をふまえて操作性を高める機構や制御手法について研究しています。対象として全方向移動車いすやベッド,搬送台車などのプロトタイプを開発し、 運動や生体信号に基づく人の特性の解析を通じて、身体的負担の低減や操作性を高める機構や制御手法を検討しています。また、ロボットコンテストを題材とする創造性教育にも力を入れています。 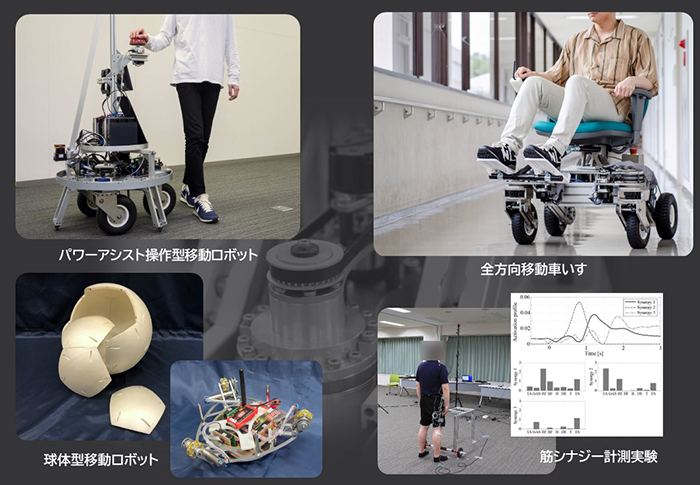 |
| 研究テーマ |
|
・移動支援・搬送支援ロボットの機構と制御 |
| 研究室ページ |
| 研究キーワード |
| 人間機械協調作業系 , 生体信号解析 , 運動解析 , ロボティクス , メカトロニクス , 生活・作業支援 , 移動・搬送支援 , ウェアラブルメカトロニクス , ロボコン教育プログラム |
| 担当教員 | |
|---|---|
 |
講師
上野 祐樹/ウエノ ユウキ/UENO Yuki 専門分野:制御工学、ロボティクス |