知性材料工学(三田)研究室
| 研究内容 |
|---|
|
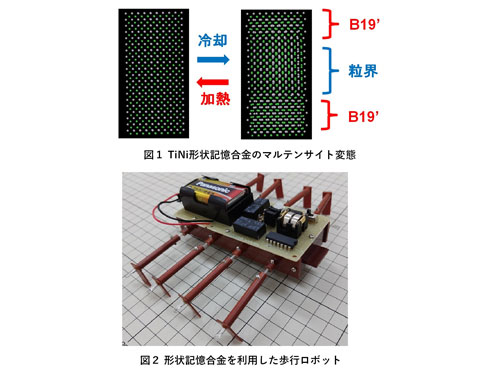
金属材料は様々な製品に利用されていますが、それぞれの材料が持つ性質(特性)を活かした使い方をする必要があります。また、近年ではセラミックス材料を機械部品の材料として利用することも検討されています。本研究室では主に金属やセラミックス材料の材料特性を各種材料試験機を用いて実験的に求めるとともにコンピュータによる数値解析(シミュレーション)で確認する他、それら材料の応用について研究しています。図1は数値計算による解析結果の例です。温度に反応してその形状を変化させる形状記憶合金(SMA)のメカニズム(マルテンサイト変態)が、結晶構造の変化として表れています。また、図2はSMAワイヤーを筋肉(アクチュエータ)として歩行ロボットに応用した例です。
 |
| 研究テーマ |
|
1.炭素鋼のウォータジェット切削に関する数値解析 |
| 研究室ページ |
|
|
| 研究キーワード |
| 金属材料 , セラミックス , 材料物性 , 破壊 , 疲労 , 材料設計シミュレーション |
| 担当教員 | |
|---|---|
 |
准教授
三田 俊裕/ミタ トシヒロ/MITA Toshihiro 専門分野:材料工学、疲労 |