ロボットモーション(関口)研究室
| 研究内容 |
|---|
|
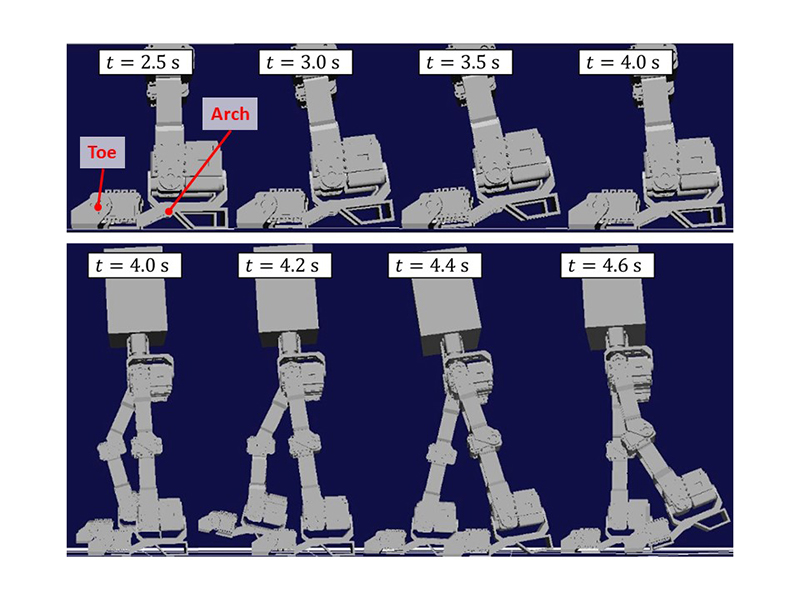
人は自然に効率的な運動を行ったり効率のよい姿勢を利用しており、ある意味でサステイナブルシステムのお手本とも言えます。本研究室では、そのような人の動作や情報処理に学んで、人のそばで暮らしを助けるロボット、メカトロニクスシステムに活用することを目指しています。そのために、人の運動の計測・解析や、ロボットの動作生成などに関する研究を行っています。
研究紹介動画はこちら
 |
| 研究テーマ |
|
・人の運動の計測と解析に関する研究 |
| 研究室ページ |
|
|
| 研究キーワード |
| ロボティクス , ホーム&オフィスメカトロニクス , 運動計測 , 運動制御 , 人型ロボット |
| 担当教員 | |
|---|---|
 |
講師
関口 暁宣/セキグチ アキノリ/SEKIGUCHI Akinori 専門分野:ロボット工学、認知ロボティクス |