HOME > Information > 2023 > Development of a Motion Detection Device Based on Human Visual Mechanism: Commenced Joint Demonstration Research with Mitaka City Welfare Labo Donguriyama

Information
Development of a Motion Detection Device Based on Human Visual Mechanism: Commenced Joint Demonstration Research with Mitaka City Welfare Labo Donguriyama
Aiming for Privacy-Conscious Monitoring of the Elderly, etc.
A research group led by Professor Hiroyuki Kameda of the Computer Science Department at Tokyo University of Technology (Hachioji City, Tokyo; President: Yutaka Kagawa,) (Note 1) has developed a device that can be utilized for monitoring the elderly through a motion detection feature grounded in human visual mechanisms. Joint demonstration research has commenced with Mitaka City Welfare Labo Donguriyama (Mitaka City, Tokyo) (Note 2), a base for promoting home medical care and nursing care, established in December.
Research Background/Objective
As the Kameda Laboratory (Thought and Language) believes that service robots that coexist with humans is crucial in an era of declining birth rates and aging populations, it is conducting research aimed at their practical application. This study is conducted as part of the foundational research for that purpose. In the demonstration research, we will verify the application scenarios and methods of the devices, such as predicting and detecting dangers and accidents among the elderly in places such as bedrooms, bathrooms, and toilets, targeting collaborators within the facility. We aim to compile reports by the end of this fiscal year and present them at academic conferences (Note 3) and elsewhere.
Research Description
The developed device is a compact camera-integrated unit that implements a motion detection mechanism mimicking the human eye's retina, using a small computer called "Raspberry Pi," and can be attached to lighting fixtures and other devices. By encrypting webcam video data and processing it internally to output as text information, the device can make necessary judgments for monitoring while protecting the privacy of care recipients (such as detecting risks of falling from the bed, accidents in the bathroom, lack of movement, etc.). Additionally, it can perform detection processing quickly with minimal computational resources, without the need for elaborate systems like artificial intelligence, making it versatile, compact, lightweight, and energy-efficient.
Future Developments
Currently, we are building interdisciplinary collaborative frameworks that also encompass research on robot bodies such as artificial muscles and artificial skin. We are also considering applications in other fields such as monitoring and accident detection in hospitals and factories, working to collaborate with related companies in addition to the said facilities. In the future, we aim to realize the practical application of service robots that support human life while understanding the intentions and emotions of others, including not only auditory but also conversational functions.
Glossary
(Note 1) Collaborative research with TM Sol Co., Ltd. (Headquarters: Itabashi-ku, Tokyo; Representative Director: Atsuko Nakata).
(Note 2) Established by Mitaka City on December 1, 2023 as a base supporting the elderly's living at home. Through collaboration with companies and universities, it promotes three projects as a multifunctional base facility: 1. Home Medical Care and Nursing Research Center, 2. Caregiver Training Center, 3. Lifestyle Rehabilitation Center.
(Note 3) Institute of Electronics, Information and Communication Engineers (IEICE) General Conference (March 4th to 8th, 2024, Hiroshima University), among others.
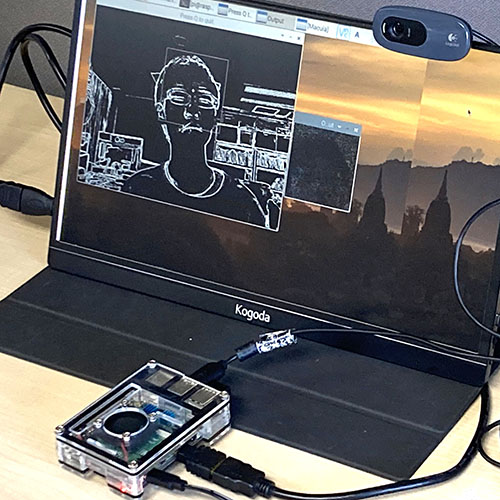
Real-time contour extraction using a small-scale program on Raspberry Pi based on video captured from a webcam.
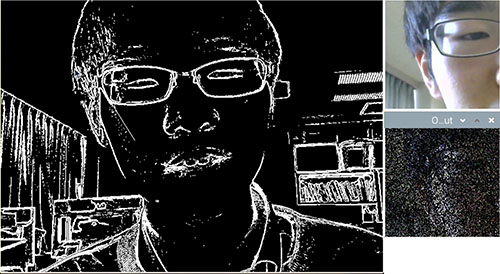
Left: Edge image, Bottom right: Anonymized image, Top right: Original image